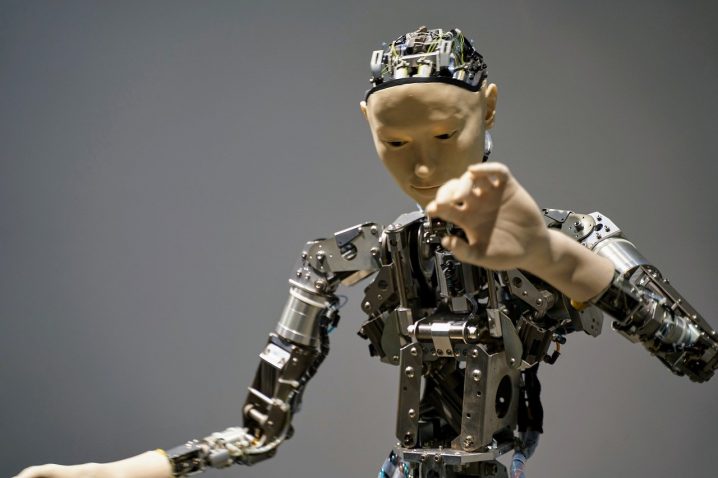
1.はじめに:人型ロボットHRP-5P
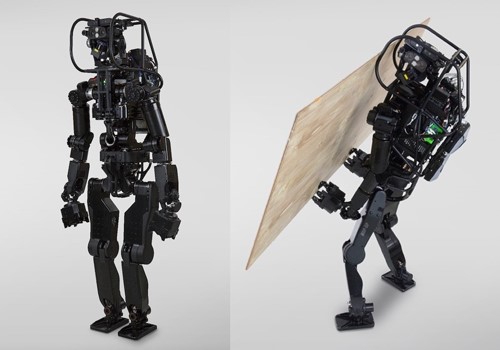
写真のロボットは産業技術総合研究所が開発し、2018年9月に発表したヒューマノイドロボット(人[ヒト]型ロボット)HRP-5Pである。身長182cm、体重101kgと大きめの体を持ち、重労働作業や危険な場所での人間の作業代替を目指して開発された[1, 2](製作はカワダロボティクス株式会社)。
HRP-5Pにより実現したのが、住宅建築で用いられる石膏ボード(重さ約11kg)を平積みされた状態から持ち上げ、両手で搬送し、電動工具を用いて壁にビスで固定するという一連の作業である。その様子はYouTubeでご覧いただくことができる。
【HRP-5P】Humanoid Robot【産総研公式】
https://www.youtube.com/watch?v=ARpd5J5gDMk
さて、このロボットを見て多くの方は「一体どこが難しいのか」と思われるのではないだろうか。例えば、有名なボストンダイナミクスの人型ロボット「アトラス」は、後方宙返り(バク宙)やパルクールなど、一般人を超えた身体能力をYouTube上で披露している。
What’s new, Atlas?
https://www.youtube.com/watch?v=fRj34o4hN4I
More Parkour Atlas
https://www.youtube.com/watch?time_continue=2&v=_sBBaNYex3E&feature=emb_logo
これに対して、HRP-5Pが行うのは、石膏ボードを持ち上げて歩き、工具を使って壁に固定するという面倒ではあるが誰でもできそうな作業である。せっかちな人のために先に言っておくと、(それを)「ロボットにやらせるのは大変に難しい」。これを説明しよう。
2.人型ロボットのどこが難しいのか?
まずはハードウェアの難しさがある。ハードウェアとは平たく言えば、ロボットの機械装置と電子回路をひっくるめたロボットの物理的な体の事。HRP-5Pは全身の関節に内蔵された47個のサーボモータによって動く(独立した関節数は37。複数のモータで駆動する関節があるため)。サーボモータとは工作機械などに用いられる精密な電動モータで、回転を正確に制御できることに特徴がある。サーボモータの効率が最高となる回転速度は毎分約3000回転(3000rpm)だが、歩行する際の関節の回転速度は毎分約30回転なので百分の一程度に減速することが望ましい。このためにはハーモニックドライブ減速器と呼ばれる部品が用いられる。ハーモニックドライブ減速機はコンパクトで、かつ普通の歯車に存在するバックラッシ(ガタ)がほぼ存在しないため、ロボットになめらかな歩行をさせるのに適している。サーボモータとハーモニックドライブ減速器をロボットの複雑な骨格構造に組み込むことで、人間の形をしたメカが完成する。
ちなみにボストンダイナミクスのアトラスの場合には、全身を動かすために油圧アクチュエータを用いている。これはジャンプなどの動作で瞬発力を出すためには、油圧駆動が有利なためである。もっとも、油圧の発生源には電動モータが使われているので、実はアトラスもHRP-5Pと同様の電力で動くロボットである。
次に、この人間の形をしたメカに感覚器である各種センサ、頭脳としてのコンピュータ、それらを結びつける神経系である配線を付け加える。例えば、地面に足が付いた感触をロボットが「感じる」ためには、足首のセンサから脚の中、股関節、腰関節を通って胴体のコンピュータまで信号線がつながっている必要がある。足首を動かすには、コンピュータが発した指令が、腰関節、股関節、脚の内部を通ってサーボアンプに伝わり、電流を発生してサーボモータを回転させなくてはならない。これらに必要な配線はモータ1個につき最低6本、センサ1個に最低4本のケーブルがあるので数百本、各種制御回路をつなぐ配線も含めるとおそらく数千本に達する。もちろん一本の接続ミスも許されない、熟練した工員が行っても何日も要する難作業だ。
参考までにHRP-5Pのような等身大の人型ロボット1台のハードウェアをゼロから開発するには、ざっくり言ってスーパーカー1台分の予算が必要である。例えば、体重101㎏のロボットを歩かせるのに必要なハイパワーなサーボモータの価格は1個5万円程度。全身47個のモータ代だけでも自動車1台くらいの値段になる。さらに特殊な部品、高度な機械加工、組み立て作業をひっくるめると価格は「億」のオーダーとなる。
さて、このスーパーカーなみのお値段の人型ロボットHRP-5Pが宅配便であなたの手元に届いたとする(巨大な棺桶のような箱で送られてくる!)。新品のパーソナルコンピュータをセットアップする事をイメージして欲しい。実際、これらのロボットには普通のパーソナルコンピュータと大差ない部品(CPU等)が用いられ、面倒で手間のかかるセットアップ作業も基本的に同じである。セットアップが終了し、普通のコンピュータであれば、あなたは文書編集ソフトや表計算ソフトを使い始められるだろう。一方、研究段階のロボットの場合、ここからが本当の大仕事、ロボットを実際に動かすためのソフトウェア開発が始まる。
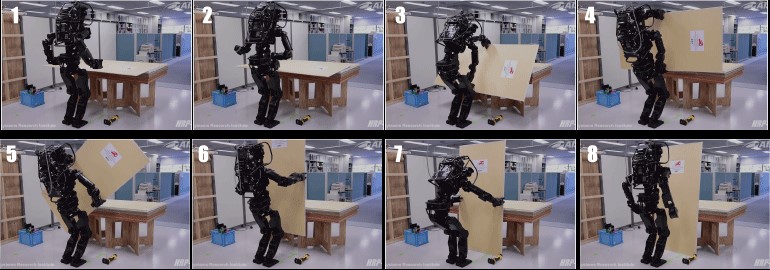
実際の作業の例として、下の写真に示すような石膏ボードを持ち上げる一連の動作を見てみよう。作業は、石膏ボード(サイズ182cm×91cm×1cm、重さ11kg)が積みかさねられた机の前にロボットが直立した状態から始まる。写真の番号にそって作業の流れを箇条書きにすると、以下のようになる。
1. 準備状態(前段階の作業により、一番上のボードが10cmほど引き出されている)
2. 右手でボードの手前の端をつかむ
3. 右手を押し下げてボードを傾け、左手で上端をつかむ
4. 両手でボードを持ち上げる
5. 両手に持ったボードを反時計回りに回転させる
6. ボードを90度回転させ垂直に保持する
7. 床にボードを下し、机に立てかける
8. 両手を離す
作業手順の4、5、6でロボットが両手で石膏ボードを反時計回りに90度回転させるが、この際、以下の3つを考慮する必要がある。
a. 両足が床面上の一定位置に存在
b. 両手がボードをつかんだまま一定の距離を維持
c. 全体の重心から下した垂線が両足の支持範囲内に落ちている
条件aとbはロボットがボードを回すために、条件cはロボットが転倒しないために必要である。三つの条件を満たす全身の関節角度を求めるには、「優先度付き全身逆運動学」と呼ばれる数値計算を用いている[3, 4]。
人間であれば一瞬の判断で行える動作をロボットで実現するために、配慮すべき面倒な事柄の多さに驚かれたのではなかろうか。しかもこれは、パネルを壁に取り付ける作業のほんの一部分にすぎないのである。
YouTubeに見る一連の作業を実現するまでに、博士号をもったプロの研究者6人が半年以上の期間を費やしてプログラミングと実験を繰り返す必要があった。
同様なソフトウェア開発は、ロボットに後方宙返りやパルクールをさせる場合であってもやはり必要となる。ロボットのパフォーマンスが仕上がるまでには長い準備期間が必要であり、撮影の際には、事故に備えたスタッフがカメラに映らないよう注意しつつ、手に汗を握ってロボットを見守るのである。
3.人型ロボットはなぜ研究する価値があるのか?(その1)
ハードウェアとソフトウェアの難しさを理解してもらえたとして、次に出てくる疑問はこれだろう。
「人なら簡単にできることを、どうして苦労して機械にやらせるのか?」
その理由は、いわゆる3K(きつい、汚い、危険)職場の作業代替を目指しているからである。ロボットは、ある程度の放射線にも耐えられる。作業環境に空調やトイレも不要だし、レーザーレンジファインダー(LiDAR、Light Detection And Ranging)が搭載されていれば照明すら不要だ。付け加えるに現在(2020年4月)世界的な大問題となっている新型コロナウイルスに感染することもない。
ただし、現状のロボットのコストと能力を考えると、ロボットが人間から職を奪うのはまだかなり先に思われる。20年程度未来では、ロボットは融通は利かないがタフな相棒として、人間の作業員の補助をすることになるだろう。特に遠隔からの指示により、危険な環境で作業してくれるロボットは必要性が高い。もちろん、ドローンやクローラ型のロボットで事足りる用途も多いが、人型ロボットでなければできない作業は常に存在する。
その一例が、2015年に米国で開催された「DARPA ロボティクスチャレンジ決勝戦(DRC Finals)」である。この大会では、福島第一原発の事故にインスパイアされた模擬的な災害事故現場が準備され、車の運転、ドア通過、バルブ回転などの技量とスピードを競うために、全世界から多くの人型ロボットが集結した。
下にお見せするのは、決勝戦当日、ドア開けに成功した直後の我々のチームのロボット「HRP-2改」の雄姿である。残念ながら我々のチームの成績は参加23チーム中10位と芳しいものではなかった。この顛末については、別の解説記事を参照されたい[5]。
 DRC Finalsにおける「HRP-2改」
DRC Finalsにおける「HRP-2改」
4.人型ロボットはなぜ研究する価値があるのか? (その2)
人ができることを苦労して機械で実現しようとするのは何故か?という問いに対する、もう一つの理由を説明しよう。それは、「我々は我々自身と同じ能力をもつ『機械』を作ることができるだろうか?」という人類のもっとも古い疑問の一つに根差している。
ギリシャ神話や古代中国の伝説に始まり、中世、近世に至るまで、人そっくりに動く機械が作られたという逸話はたくさん存在する。私に言わせれば現代のロボット工学もその延長線上にある。その一貫した動機は、「我々自身と同じ能力をもつ『機械』を作ることはできるか?」というビッグクエスチョンだ。人類がこれまで知りえた科学知識を総動員し、自らの手で人型ロボットを作り出すという試みにゾクゾクするような興奮を感ずる研究者や技術者は少なくないはずだ。もちろん私もその一人である。さらにかっこよく、こう言い換えることもできるだろう。
人型ロボットの研究は「我々はどこから来たのか 我々は何者か 我々はどこへ行くのか」という人類共通の根源的な問いに、科学技術で答えることを目指している。
こうした企ての一つとして位置づけられるのが、我々が2009年に発表したサイバネティックヒューマンHRP-4C(愛称「未夢(みいむ)」)(写真)である。
 HRP-4C「未夢」全身
HRP-4C「未夢」全身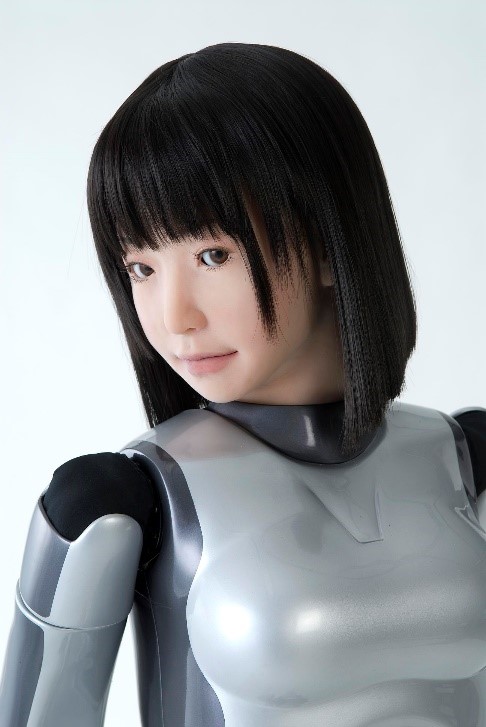 HRP-4C アップ
HRP-4C アップ
HRP-4Cは身長160cm、体重48kgの人型ロボットで、日本人の若い女性の平均的なプロポーションを再現するように設計されている[6]。我々がこのロボットを開発した主目的は、ファッションショーやパフォーマンス等のエンターテインメント分野への人型ロボットの応用を模索することにあった。同時に、このロボットを用いて、できるだけ人に近い歩行動作を実現するなどの基礎研究も行っている。ただし、HRP-4Cの手は華奢すぎて物をつかむことができず、ドアや窓を開けることさえできない。
では、人と同様な作業のできるような人型ロボットが実現するまでには、あとどれくらいかかるだろうか? 例えば、一般の人ならほぼ誰でもできる以下の作業を考えてみよう。
・床の上にまとめて置かれた洗濯物を、一枚一枚取りあげてきれいに畳む
・乗用車のドアをあけ、自力で運転席に乗り込んで車を発進させる
・人間とまったく同じ手順でカップ焼きそばを作る
断言するが、これらの作業ができるロボットは未だに世界のどこにも存在しないし、どう作ればよいかさえ良くわかっていない。「専用機械を作ればできる」と言われるかも知れないが、それは問題のとらえ方を間違えている。特別な治具や事前の段取りを必要とせず、人間と同じように手際よく働いてくれる機械、それこそが人型ロボット研究の目指す究極の目標なのである。
既存のロボット工学の枠組みは、この目標に対して不十分である可能性が高い。冒頭で紹介したHRP-5Pでは作業を行うために、物体の精密なモデルを準備し、レーザーレンジファインダの計測結果とマッチングさせることで対象物を認識する。しかし、人間が洗濯物を畳む際、我々の脳内に「洗濯物の精密なモデル」が本当に存在するのだろうか?
近年、機械学習の技術がロボットに対しても適応されるようになり、従来とは異なるアプローチで、ロボットの制御がなされるようになってきた。例えば、産総研の人工知能研究センターと早稲田大学の尾形哲也教授らは、深層学習を利用して、タオルや本などを繰り返し折りたたむことのできるロボットを実現した [7]。リカレント・ニューラルネットワーク(RNN)とオートエンコーダを駆使した彼らの手法は、対象物体の精密なモデルを前提とする従来のロボット研究の限界を見事にぶち破った快挙と言える。
ただし、深層学習(例えばRNN)さえあればすぐに人間と同レベルのロボットが実現できるかと言えば、それは疑問である。例えば、深層学習ではロボットが想定外の誤動作を起こしてしまう危険性を排除できないこと、また、動いているシステムに新たな機能を追加する方法がまだ明確ではないという問題点があると思う。望ましいのは、従来の正確なモデルを使った制御と深層学習に代表される機械学習に基づく制御をうまく融合させたロボットシステムである。しかしこれがまさに今全世界の研究者達が頭を悩ませている課題である。
5.モラベックのパラドックスと未来への展望
カーネギーメロン大学のロボット研究者ハンス・モラベックは、著書 “Mind Children”(邦訳『電脳生物たち』[8])の中で1970年代の人工知能とロボット研究をこう回想している。当時最先端の知能ロボット「シェイキー」はカメラの画像処理に一時間も費やし、車輪で走行するのだがスピードは非常にのろかった。これを横目に、チェッカーゲームや数学の定理証明などを実現していた人工知能の研究者は、ロボット工学の研究者は能力が低いのでは?と疑ったという。これに対し、モラベックが憤然と反論する。
「実験が積みかさねられるにつれて、知能テストやチェッカーの問題を解くのならコンピューターに大人並みの能力を発揮させるのは比較的やさしいが、知覚や行動となると一歳児の技能をコンピューターに持たせることが困難ないし不可能であることが明らかとなった」([8], p.24)
これを「モラベックのパラドックス」と呼ぶ。計算機にとっては大人の知的能力より、一歳児の能力実現のほうがはるかに難しいというのがパラドックス(逆説)たるゆえんである。このパラドックスの原因は、二つの能力の起源を考えれば理解できる。ゲームや数学の定理証明などの「知的な活動」がたかだか過去数千年の人類文化の中で生まれたものであるのに対して、一歳児の技能の背後には、数億年にわたる進化によって獲得された神経回路が秘められている。その秘密を解明することが簡単であるはずがない。過去半世紀にわたる人型ロボット研究は、ロボットに一歳児レベルの能力を与えることを目指した研究者たちの挑戦と挫折の繰り返しであったと言えるかも知れない。
しかし今、先に紹介した深層学習によるロボット制御は突破口を開きつつあるように見える。課題はまだ多いが、世界中の研究者がインターネット上で協力してオープンに研究を進めている現在の状況には希望が持てる。
モラベックのパラドックスが一人の天才によって一夜にして解決されるとは思わない。おそらくは、世界中のたくさんの研究者たちによって問題は一つずつ着実に解決されてゆくだろう。その過程で人類は長年の疑問の答えをつかむとともに、「ロボット工学の真の黄金時代」が到来するのではないかと私は期待しているのである。

参考文献
[1] K.Kaneko, H.Kaminaga, T.Sakaguchi, S.Kajita, M.Morisawa, I.Kumagai, and F.Kanehiro, “Humanoid Robot HRP-5P: an Electrically Actuated Humanoid Robot with High Power and Wide Range Joints,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp.1431-1438, April, 2019. [2] I.Kumagai, M.Morisawa, T.Sakaguchi, S.Nakaoka, K.Kaneko, H.Kaminaga, S.Kajita, M.Benallegue, R.Cisneros, and F.Kanehiro, “Toward Industrialization of Humanoid Robots”, IEEE Robotics and Automation Magazine, pp.20-29, December 2019. [3] 吉川恒夫『ロボット制御基礎論』コロナ社、1988. [4] 松野文俊(主査),大須賀公一(幹事),松原 仁,野田五十樹,稲見昌彦編集『ロボット制御学ハンドブック』19.9 優先度付き全身運動制御<森澤光晴>、近代科学社、2017. [5] 梶田秀司、森澤光晴、中岡慎一郎、シスネロス・ラファエル、阪口健、金子健二、金広文男、“DARPAロボティクスチャレンジ決勝戦でのロボットシステム開発と教訓”, 日本ロボット学会誌 vol.34, no.6, pp.360-365, 2016.https://www.jstage.jst.go.jp/article/jrsj/34/6/34_34_360/_article/-char/ja [6] 梶田秀司、“ヒューマノイドロボットはただの機械ですが?”, 日本ロボット学会誌、 Vol.31、 No.9, pp.830-832, 2013.
https://www.jstage.jst.go.jp/article/jrsj/31/9/31_31_830/_article/-char/ja/ [7] YouTube: 深層学習(Deep Learning)を利用した「物体折り畳みタスク」【産総研公式】
https://www.youtube.com/watch?v=YH1TrL1q6Po [8] H.モラベック、野崎昭弘訳『電脳生物たち 超AIによる文明の乗っ取り』、岩波書店、1991.





